
Unleashing Unprecedented Speed in Robotics, Acceleration Robotics' ROBOTCORE® ROS 2 and RTPS Pave the Way Towards Robot-specific Chips Setting New Benchmarks in Performance, Energy-efficiency and Reliability for ROS 2 Networking
| Press release (English) | link |
| Nota de prensa (Español) | link |
VITORIA-GASTEIZ, Spain – Acceleration Robotics —a robotics semiconductor startup founded in the Basque Country, Spain and with offices in India— announced the results after one year of development with the release of ROBOTCORE® ROS 2 and ROBOTCORE® RTPS, marking a significant milestone in the field of robotics networking by implementing in hardware (prototyped with an FPGA) technology that allows robots to exchange information in less than 2.5 microseconds. These products are designed to revolutionize robotics and ROS 2 networking communications, delivering speeds from 62x to thousands of times faster than current standards.
ROBOTCORE® ROS 2: A New Era of High-Speed Robotics Networking

ROBOTCORE® ROS 2 is an expertly crafted hardware design that implements the ROS 2 robotics framework. Similarly, ROBOTCORE RTPS implements in hardware the Real-Time Publish Subscribe (RTPS) protocol and parts of the Data Distribution Service (DDS) communication middleware, a relevant communication backbone of robotics. Leveraging the power of FPGA technology for quick prototyping and implementation, this robot core (also known as IP core), is engineered to dramatically enhance the speed of ROS 2 robot networking communications. This means faster data processing, reduced latency, and improved synchronization across your robotics systems. Powering the future of accelerated robotics networking, ROBOTCORE® ROS 2 can send or receive packages in less than 2.5 microseconds, accelerating networking by more than 62x on average when compared to traditional software implementations on modern CPUs.
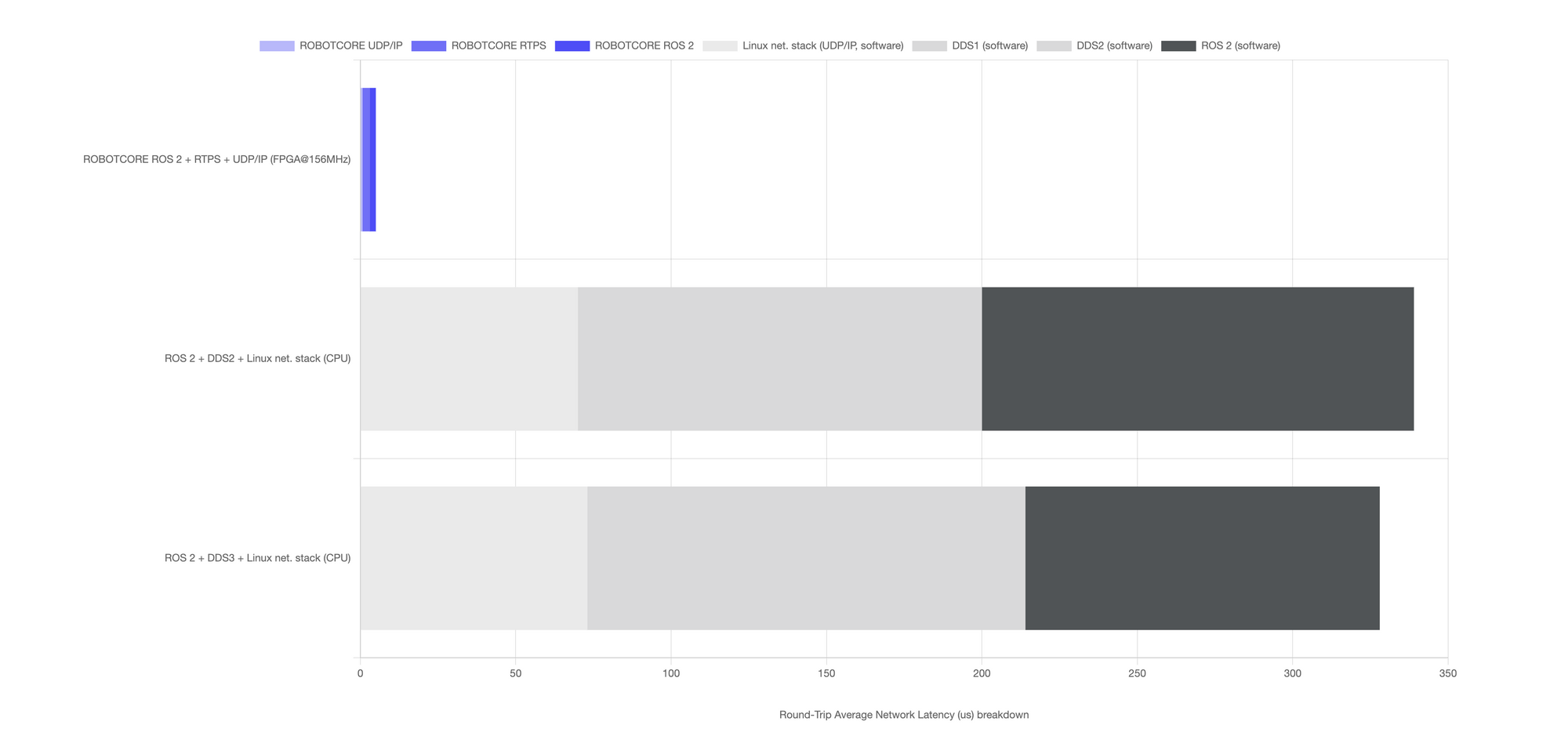
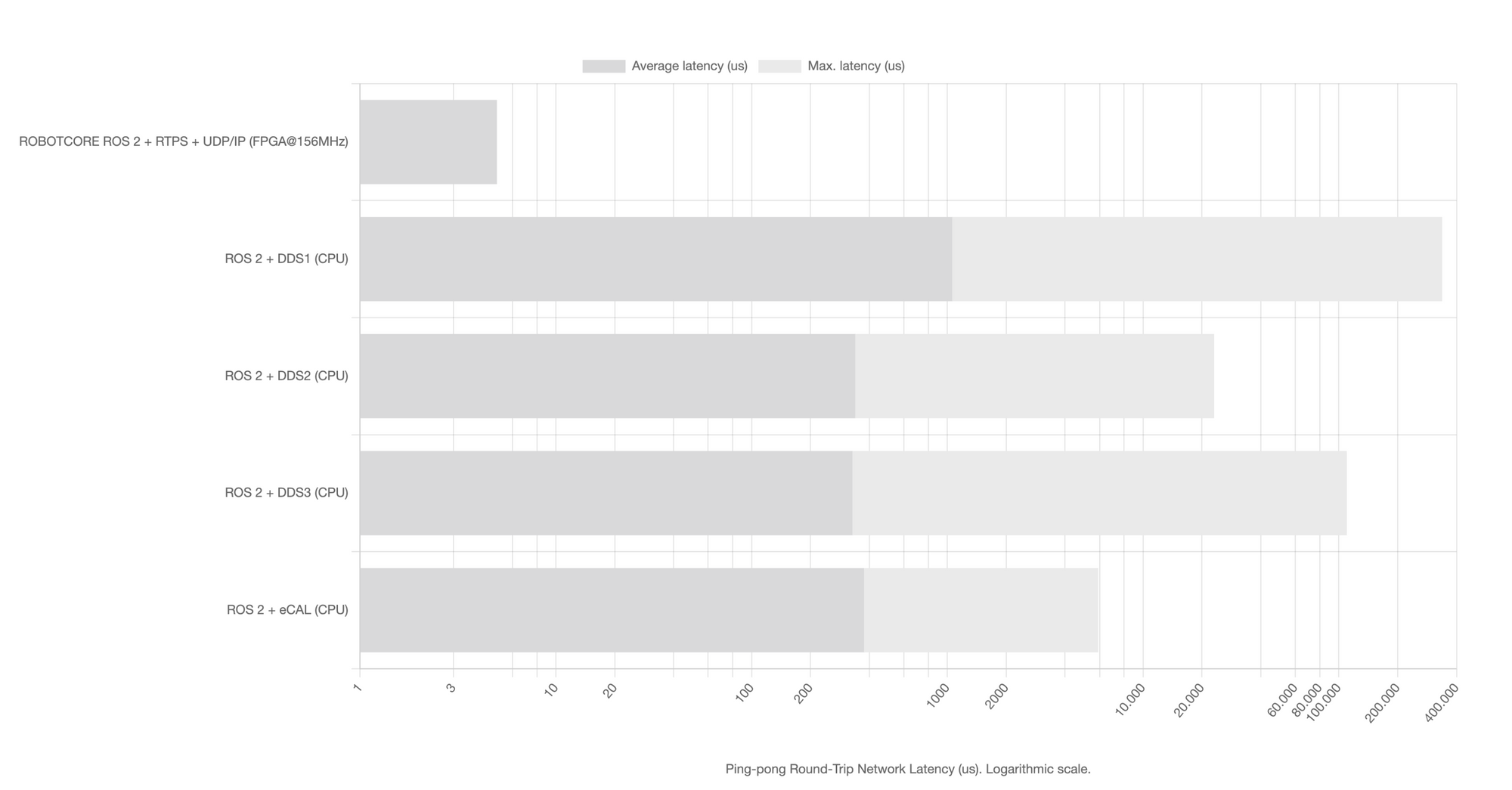
ROS 2 is instrumental in robotics and among its capabilities, it delivers a message-passing infrastructure for robots that acts like a communication 'databus', a system that connects and transfers data between robotic components over the network (unlike a database that stores data). ROBOTCORE® ROS 2 delivers faster robot data transmission or reception over multiple data link layers (both wired and wireless), leading to reduced latency and more determinism, crucial for real-time applications in robotics. ROBOTCORE® ROS 2 can send or receive small ROS 2 messages in less than 2.5 us (one-way) and establish a round-trip communication within 5 us for control applications, accelerating networking by more than 62x when compared to traditional software implementations on modern CPUs. When considering the worst case scenario (maximum latency) for small ROS 2 messages, ROBOTCORE ROS 2 remains deterministic, reporting a consistent round-trip latency below 5 us. Opposed to this, software implementations on modern CPUs take on average 339 us for the same task, but can reach latencies of 22.7 ms (22700 us) or more, which means ROBOTCORE ROS 2 is Thousands-Fold (4540x) faster in these worst case scenarios.
5 years pursuing better robot hardware
ROBOTCORE® ROS 2 is the result of the last 5 years working towards faster and more efficient hardware for robots. In 2018, Mayoral-Vilches and his team released a series of papers[1][2][3][4] that investigated robot networking and unveiled that modern CPU-based networking solutions, even when optimized, could not cope with many of the real-time needs of modern distributed robotic systems in industry. Custom computer architectures meant for robotics were in need. For the last years Mayoral-Vilches has been working with top experts from industry and academia – including Intel, AMD, Microchip or Harvard among others– to create tools to develop such systems and performance benchmarking. First with ROBOTCORE[5] and later with RobotPerf[6], this work has attracted hundreds across industry and academia due to its relevance for the future of robotics computing.
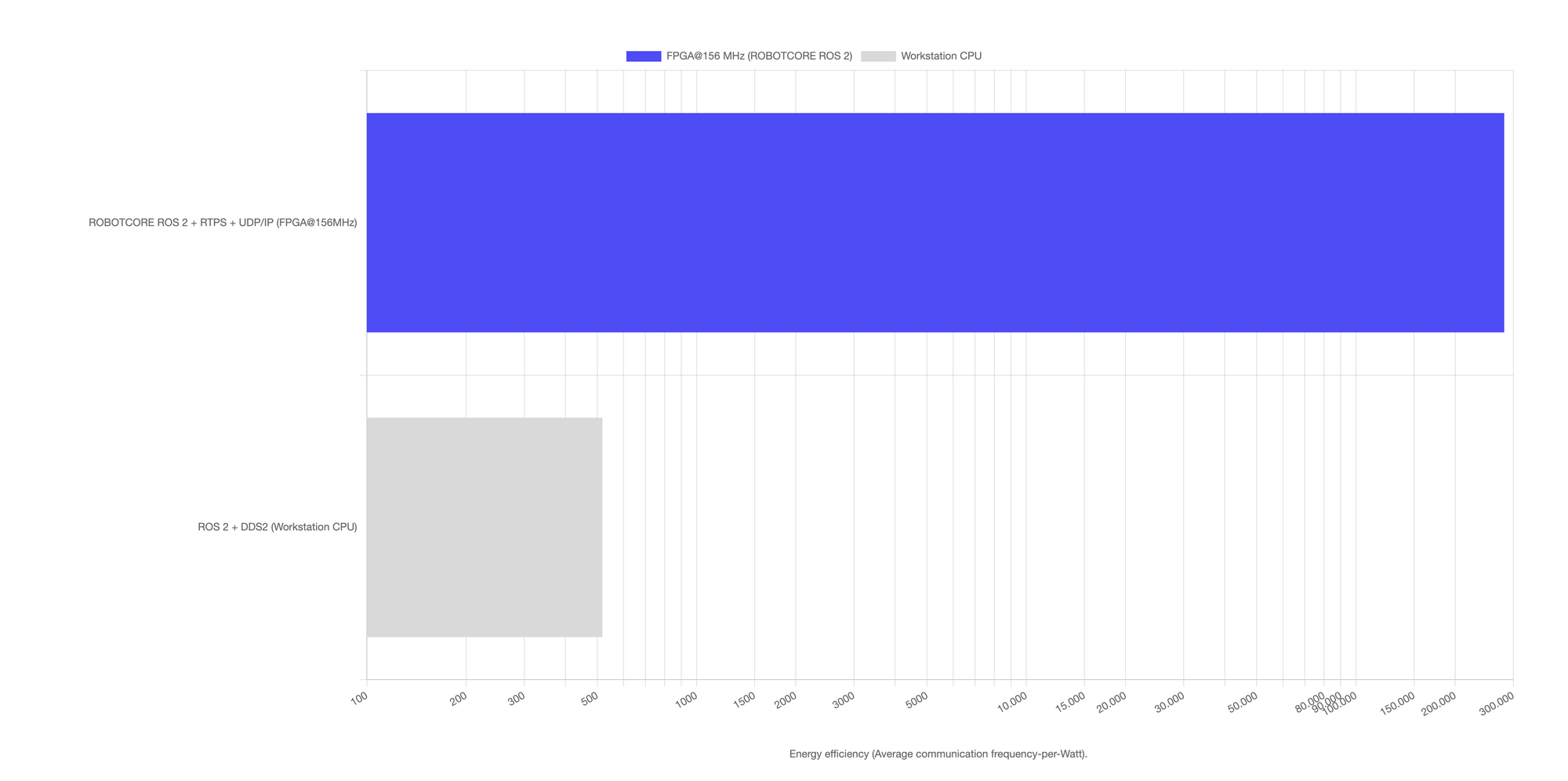
ROBOTCORE® ROS 2 is the latest result from this series and delivers absolute determinism via hardware when combined with underlying ROBOTCORE® RTPS and ROBOTCORE® UDP/IP designs. Compared to software-based solutions, it ensures that the communication latency is lower, consuming less energy and that latency remains always the same, regardless of the load of the system. Crucial for real-time robotic systems and solving major bottlenecks in robotic communications today.
Gutiérrez, C. S. V., Juan, L. U. S., Ugarte, I. Z., & Vilches, V. M. (2018). Real-time Linux communications: an evaluation of the Linux communication stack for real-time robotic applications. arXiv preprint arXiv:1808.10821. ↩︎
Gutiérrez, C. S. V., Juan, L. U. S., Ugarte, I. Z., & Vilches, V. M. (2018). Towards a distributed and real-time framework for robots: Evaluation of ROS 2.0 communications for real-time robotic applications. arXiv preprint arXiv:1809.02595. ↩︎
Gutiérrez, C. S. V., Juan, L. U. S., Ugarte, I. Z., & Vilches, V. M. (2018). Time-sensitive networking for robotics. arXiv preprint arXiv:1804.07643. ↩︎
Gutiérrez, C. S. V., Juan, L. U. S., Ugarte, I. Z., Goenaga, I. M., Kirschgens, L. A., & Vilches, V. M. (2018). Time synchronization in modular collaborative robots. arXiv preprint arXiv:1809.07295. ↩︎
Mayoral-Vilches, V., Neuman, S. M., Plancher, B., & Reddi, V. J. (2022, October). ROBOTCORE: An open architecture for hardware acceleration in ROS 2. In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 9692-9699). IEEE. ↩︎
Mayoral-Vilches, V., Jabbour, J., Hsiao, Y. S., Wan, Z., Martínez-Fariña, A., Crespo-Alvarez, M., ... & Reddi, V. J. (2023). RobotPerf: An Open-Source, Vendor-Agnostic, Benchmarking Suite for Evaluating Robotics Computing System Performance. arXiv preprint arXiv:2309.09212 ↩︎
Key Features and Technological Advancements
- Microsecond-Level Speed: Achieves unprecedented speeds in networking communications, vital for real-time robotic applications.
- Significant Latency Reduction: Compared to traditional CPUs, ROBOTCORE® ROS 2, RTPS and UDP/IP drastically lowers latency, ensuring rapid and efficient data transmission.
- Deterministic Networking: Addresses the lack of determinism in common robotic networking stacks, providing consistent and predictable communication performance.
- Energy and Resource Efficiency: Balances high-speed data processing with low power consumption, essential for energy-conscious environments.
Versatility in Applications
The ROBOTCORE® ROS 2 is not just technologically superior; it is also versatile and widely compatible. Ideal for scenarios where speed and reliability are non-negotiable, it finds extensive applications in:
- Industrial Automation: Streamlines communication in manufacturing and assembly lines for enhanced operational efficiency.
- Remote Operation: Offers smooth and responsive control in teleoperation systems, crucial for precision tasks.
- Autonomous Vehicles: Ensures rapid data exchange essential for the real-time decision-making of autonomous driving systems.
- Research and Development: Provides a reliable platform for developing and testing next-generation robotic technologies.
Supported Silicon and Hardware Solutions: Broad Compatibility for Diverse Applications
ROBOTCORE® ROS 2 is not only a breakthrough in technology but also in versatility. Designed to operate seamlessly with the most popular FPGA silicon vendors, it offers broad compatibility with FPGA and FPGA SoC solutions from leading silicon vendors including Intel, AMD or Microchip, supporting new silicon solutions like Intel's Agilex, AMD’s Versal or Microchip’s PolarFire. This also includes a range of development kits, empowering developers to build advanced robots with hardware acceleration and ROS (Robot Operating System).
About Acceleration Robotics
Acceleration Robotics is a firm focused on designing customized brains for robots to hasten their response time. Founded by top robotic experts to deliver semiconductor building blocks for robots, the company leverages GPUs and FPGAs to create custom hardware that speeds up a robot's operation.