
Driving Forward with Autoware Accelerators: Merging Axell's Semiconductor Genius with TIER IV's Advanced Autonomous Vehicle Architecture
Acceleration Robotics has always been at the forefront of pushing boundaries in robotic computing. Dedicated to designing the brainpower of robots, we craft custom compute architectures that promise high performance. Today, we look at the latest strides in robot semiconductor building blocks and how they're revolutionizing the world of autonomous vehicles.
The Rise of Autonomous Driving SoC
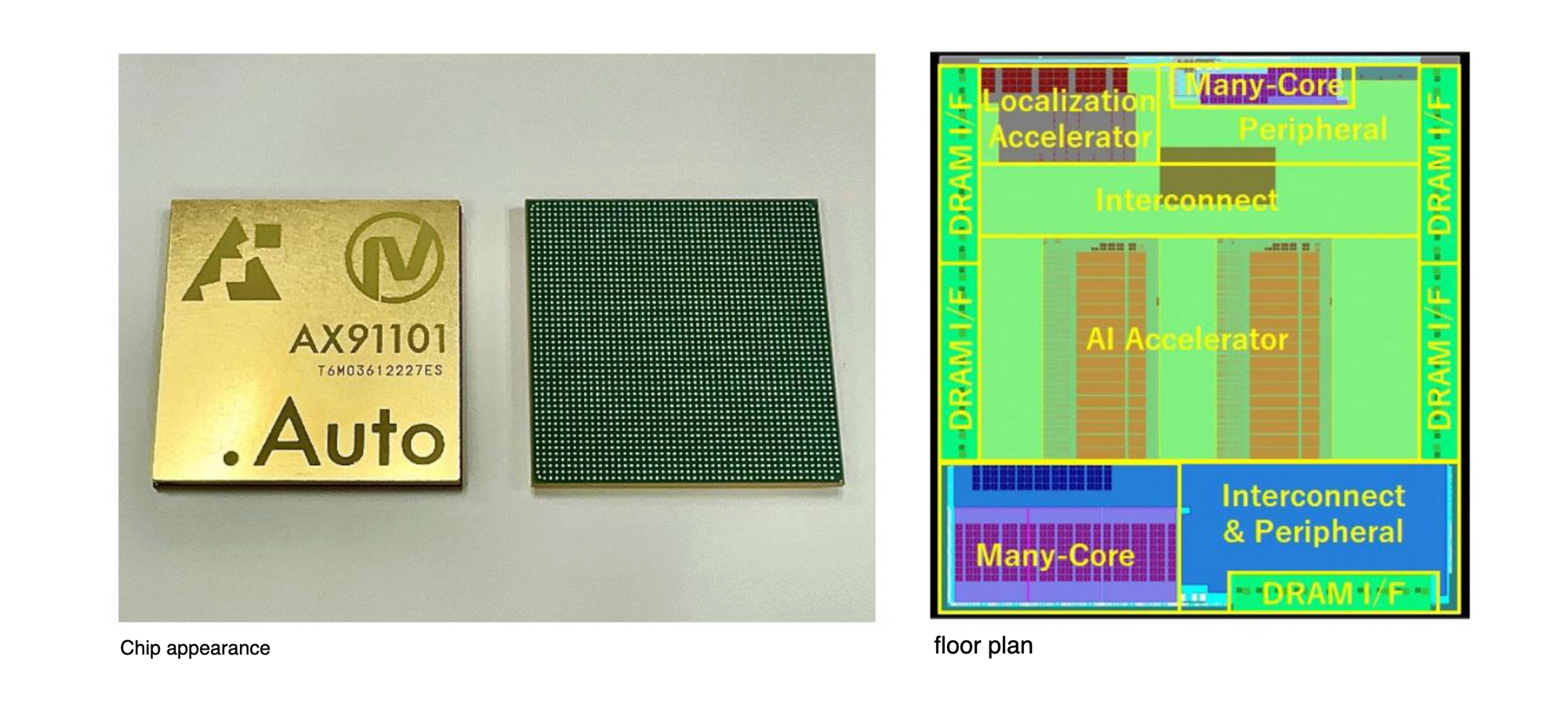
A few months ago, Axell, a technological juggernaut intent on propelling us into a tech-savvy future, declared the successful prototype completion of a System-on-Chip (SoC) tailor-made for full-fledged Autonomous Driving. This monumental achievement was made possible through a collaborative partnership with TIER IV, Kato Laboratory at the University of Tokyo, and Azumi Laboratory at Saitama University (source).
In a subsequent announcement, both companies shared exhilarating news. Their field tests were a resounding success, culminating in the creation of an application-specific SoC and software platform exclusively designed for autonomous vehicles. This initiative bore fruit in the form of the Autoware Accelerators – hardware accelerators custom-fabricated for the Autoware architecture (source).
This groundbreaking research venture received funding from the "Innovative AI Chip and Next-Generation Computing Technology Development" project, an initiative of the New Energy and Industrial Technology Development Organization (NEDO).
Features and Advancements of the New SoC
At the heart of this innovation is the SoC's immaculate integration with Autoware, TIER IV's world-renowned open-source software dedicated to autonomous driving. The SoC stands out with its ability to efficiently execute a myriad of AD algorithms. The vision is clear – laying the foundation for an all-encompassing Robo-Taxi system, projected to function at an astonishingly low power consumption of less than 150W. Thanks to state-of-the-art semiconductor processes, this is now within reach.
One of the standout features is the system's hardware accelerators. Engineered to handle high-load sensor data processing, hardware accelerators can achieve a power consumption reduction of almost ten times when compared to their predecessors.
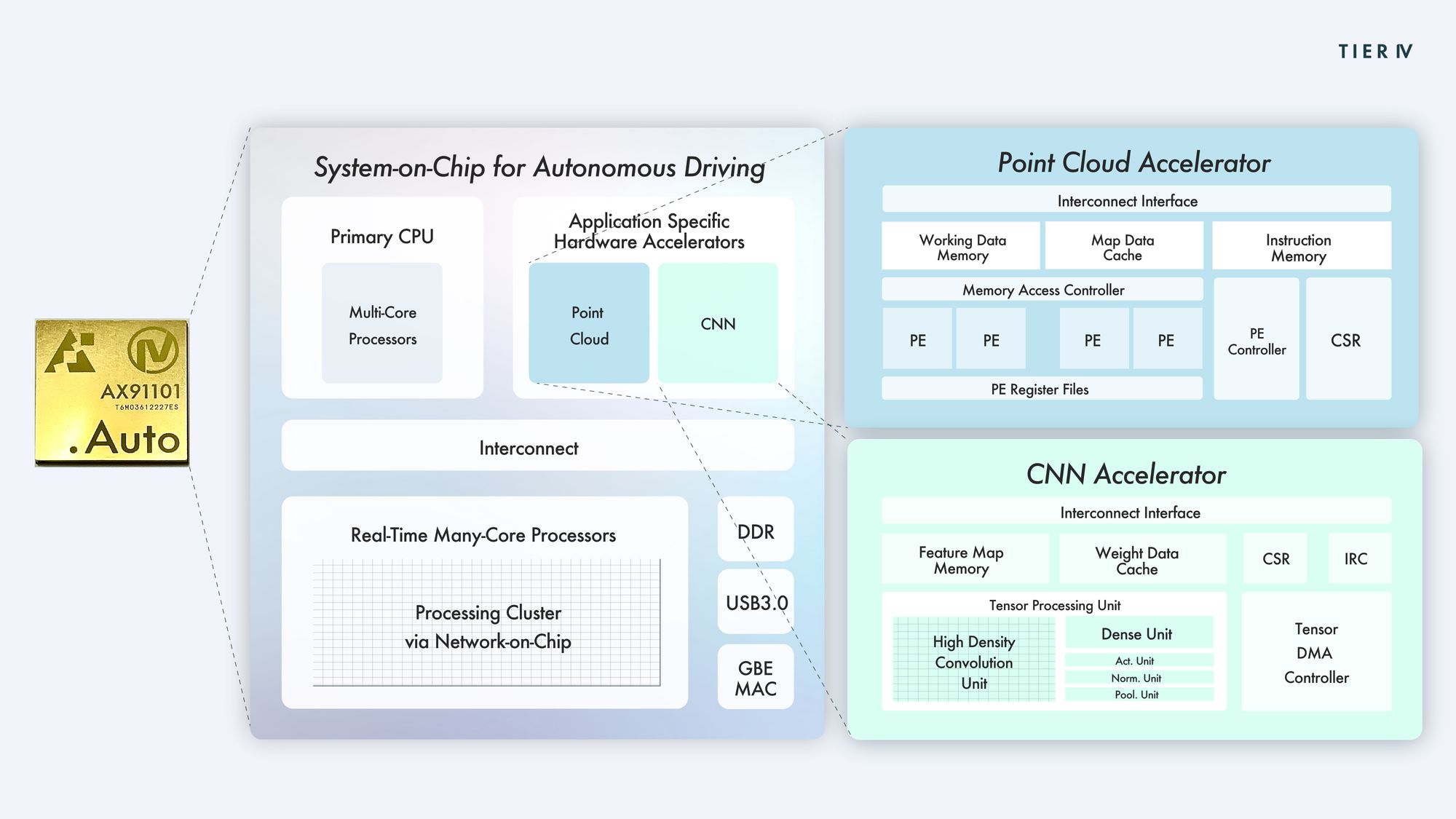
The system also boasts an integrated real-time operating system (RTOS) paired with many-core processors, ensuring fluctuations in execution time are kept at bay.
The underlying technology, transformed into LSI, encapsulates a hardware accelerator fine-tuned for various stages of autonomous driving. Coupled with multiple cores tailored for real-time processing, the SoC is adept at managing limited computational resources in an AI edge computing scenario, such as an autonomous driving system. The outcome? Enhanced speed, power efficiency, and real-time performance.
Diving Deep into Autoware and Its Architecture
Autoware stands out as a beacon in the realm of open-source platforms for autonomous driving. Pioneered by TIER IV, it's a testament to the potential of community-driven development and innovation in the autonomous vehicle sector.
The Core Architecture
Autoware's architectural framework is both modular and scalable. Here are its core components:
- Sensing: This module focuses on acquiring data from various sensors, including LIDAR, cameras, and IMUs (Inertial Measurement Units).
- Perception: Raw sensor data is processed in this phase, detecting obstacles, estimating their velocity, and predicting their future movements.
- Localization: Utilizing high-definition maps and sensor data, this module determines the precise position of the vehicle in its environment.
- Planning: Based on the vehicle's location and the surrounding environment, Autoware's planning component charts a safe and efficient route for the vehicle to follow.
- Control: This final module ensures that the vehicle acts according to the planned route by controlling the throttle, brakes, and steering.
Autoware also embraces the ROS (Robot Operating System) framework, which further augments its modularity and adaptability. The ROS compatibility enables developers to create and integrate custom modules with ease.
Leveraging the Community
One of the crowning glories of Autoware is its community-driven development model. It harnesses the collective expertise of developers, researchers, and industry professionals from around the globe. As a result, Autoware remains agile, continually evolving and integrating the latest advancements in the field.
At Acceleration Robotics, we understand the profound impact of innovations like these on the world of robotics. These Autoware Accelerators are an instance of the robot accelerators we've been pioneering for the last couple of years. We applaud the involvement of Axell and TIER IV on this area and look forward to see more innovations and accelerators coming from other groups.
News like this reaffirm our mission: to advance robot responsiveness through custom compute architectures and hardware acceleration solutions. Whether it's FPGAs or GPUs, our commitment to being accelerator-agnostic and robot-agnostic ensures that the horizon of robotic advancements remains boundless.