
Acceleration Robotics and Harvard University will present in Japan an Open Architecture for hardware accelerating robots that helps prototype “robot chips” and make robot computations faster
| Press release (English) | link |
| Nota de prensa (Español) | link |
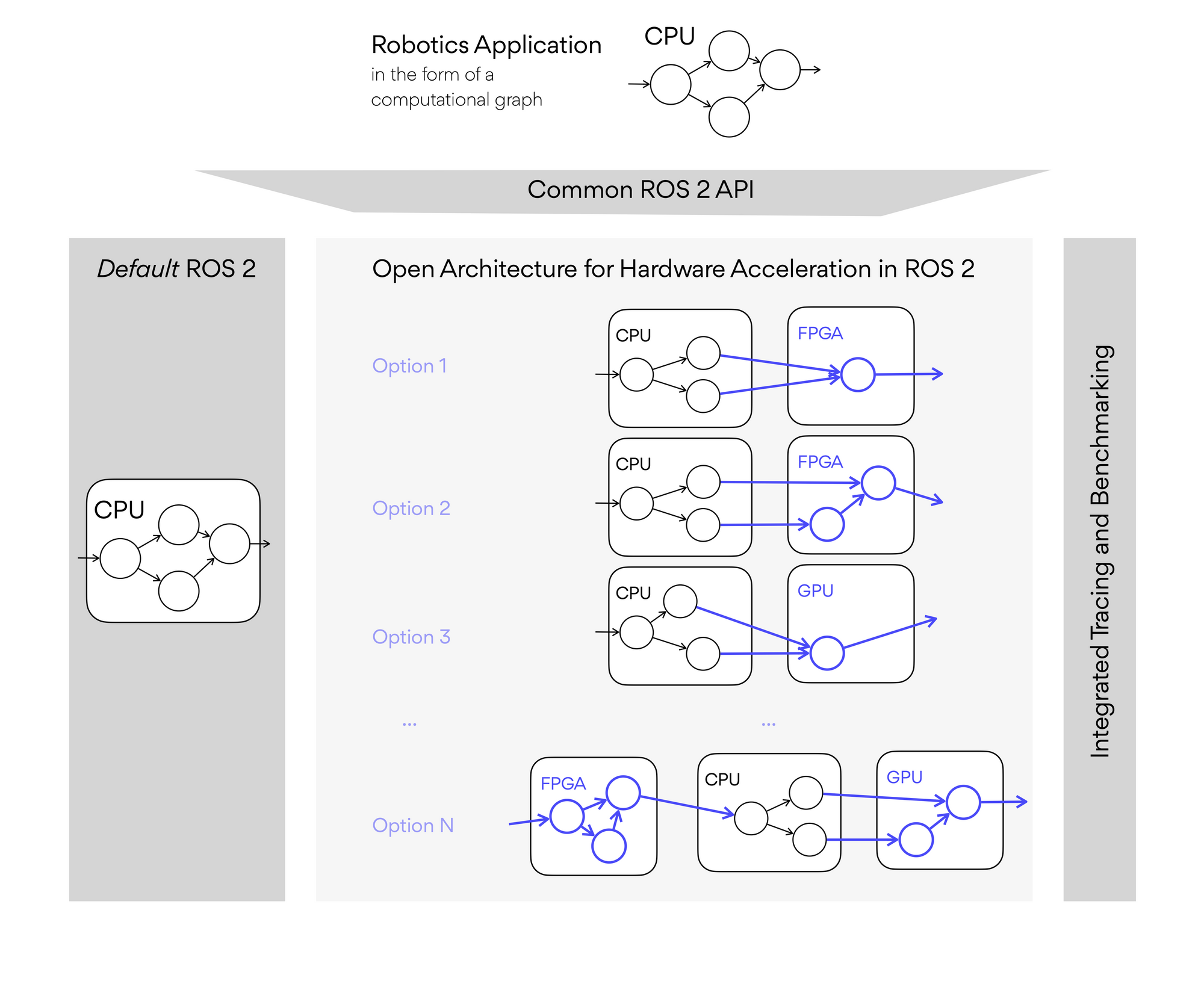
VITORIA-GASTEIZ, Spain – Acceleration Robotics —a robotics semiconductor startup based in the Basque Country, Spain— together with Prof. Vijay Janapa Reddi from Harvard University and researchers at the Harvard Edge Computing Lab will present next October in Japan their latest work on democratizing the use of hardware acceleration in robotics in a scalable, vendor- and technology-agnostic manner. Titled as “RobotCore: An Open Architecture for Hardware Acceleration in ROS 2”, their paper describes and discloses a reference implementation of the architectural pillars and the programming conventions required to introduce hardware acceleration in robotics in a sustainable manner, avoiding semiconductor vendor lock-ins. Shortly, hardware acceleration allows the creation of custom compute architectures (named robot “accelerators” or “cores”) that exploit compute parallelism. Instead of building solely on CPUs, with hardware acceleration (through FPGAs or GPUs) roboticists can empower faster robots, with reduced computation times, lower power consumption and more deterministic responses. The core idea behind their research is to facilitate the process of using this technology which, according to the researchers, with the current solutions requires “expertise in each specific hardware (acceleration) platform”.
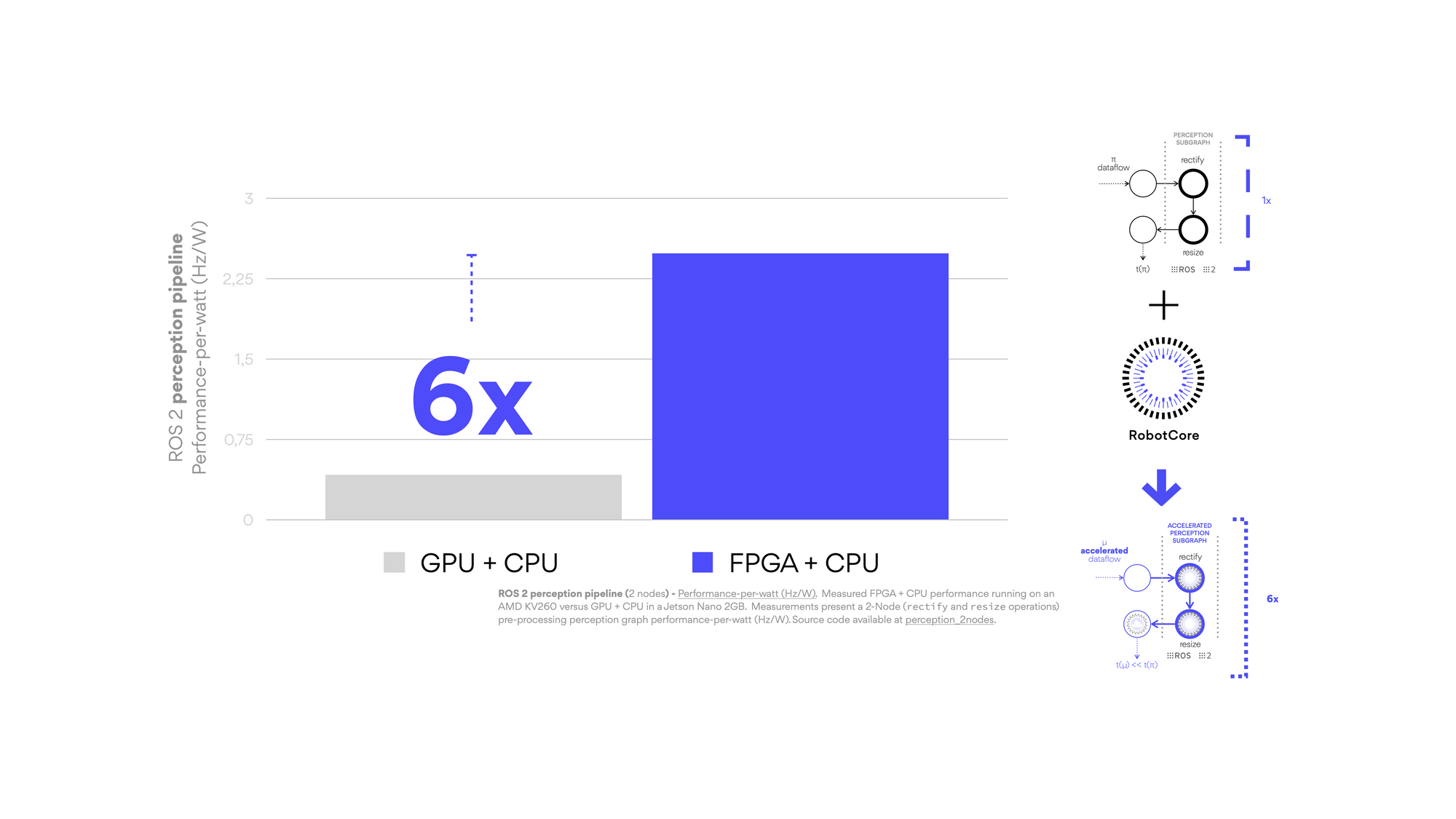
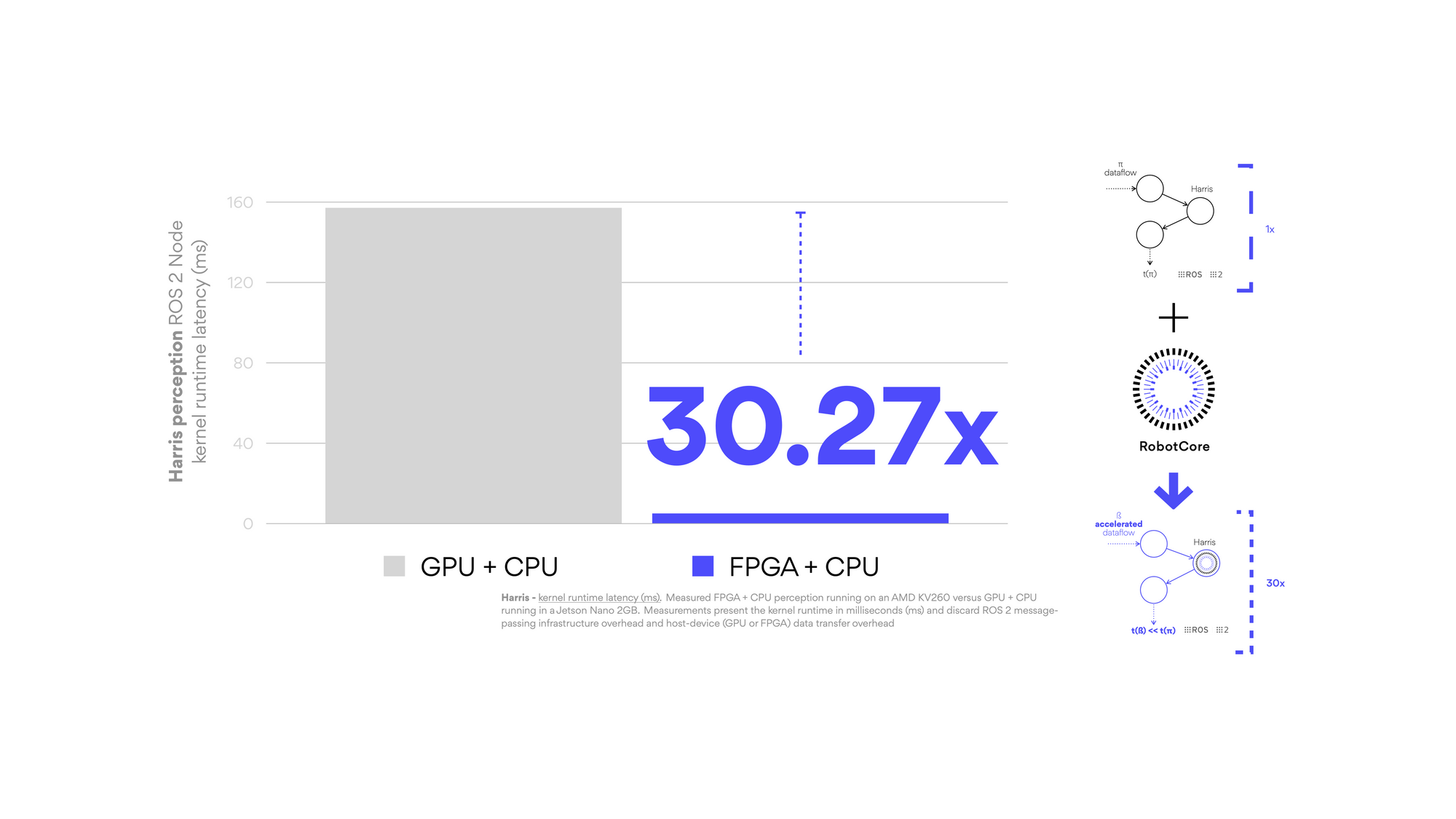
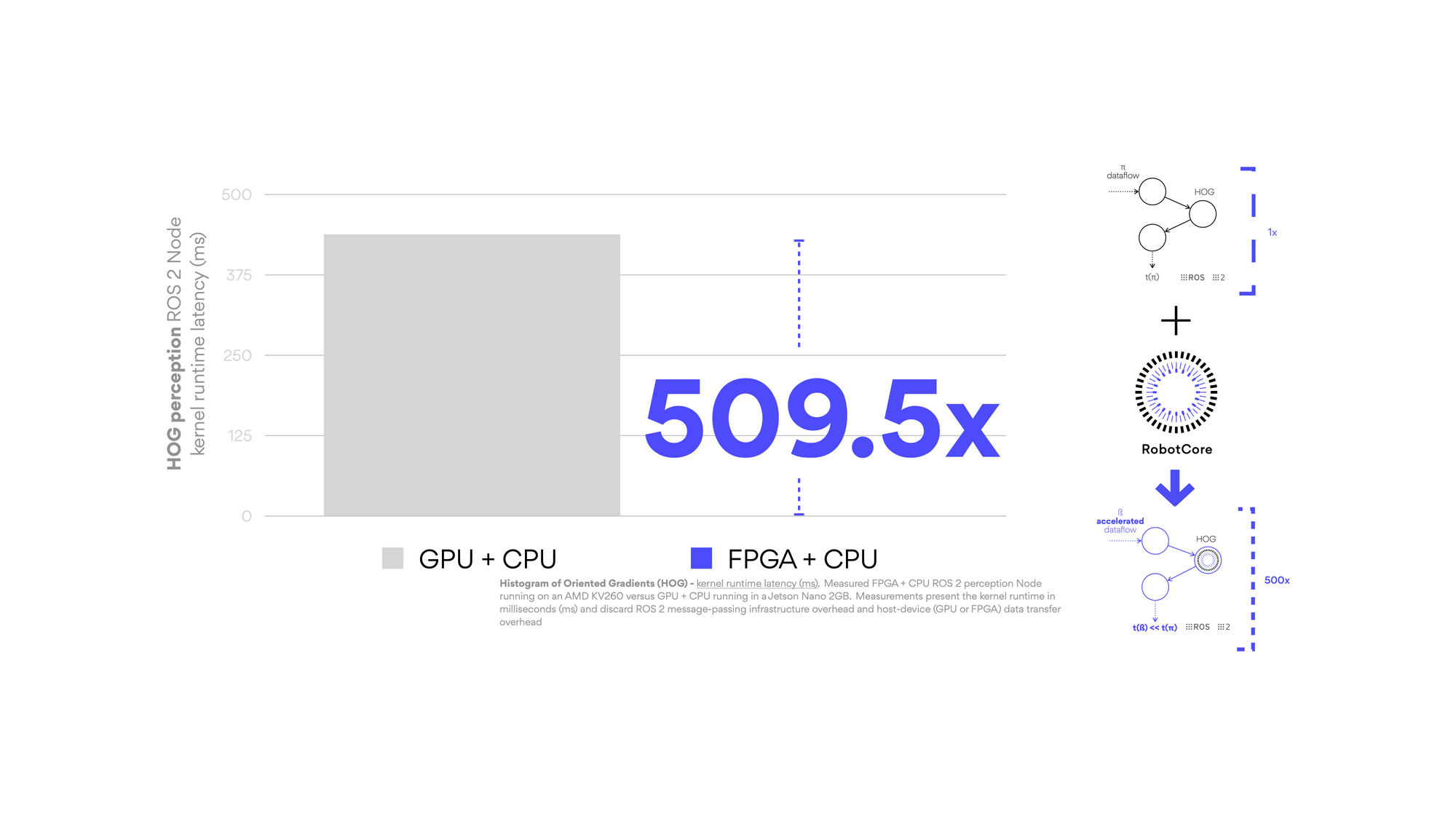
The research effort is led by Víctor Mayoral-Vilches, an experienced roboticist and a former Systems Architect at Xilinx (now AMD) who left the company to create his own startup (Acceleration Robotics) that focuses on creating these robot accelerators, or semiconductor building blocks for robots mixing CPUs, FPGAs and GPUs. The whole group together demonstrated their Open Architecture against the Robot Operating System (ROS 2), a popular event-driven programming interface for building robot applications. The resulting robot accelerators deliver significant computation speedups when compared to modern CPU performance:
“Robots are deterministic machines. Meeting time deadlines in their computations is the most important feature. Their behaviors take the form of computational graphs, with data flowing between Nodes, across physical networks (communication buses) and while mapping to underlying sensors and actuators. The popular choice to build graphs for robots these days is ROS. Most companies building real robots use ROS or similar event-driven software frameworks, but they do so in a CPU-centric manner. We demonstrated in our work how hardware acceleration combining FPGAs and GPUs properly can revolutionize robotics, increasing determinism and speeding up robot response times enabling new applications with robots”. - Víctor Mayoral-Vilches, Acceleration Robotics, Founder.
This piece of research also allows us to easily compare and benchmark different compute solutions in robotics and paves the way towards enabling roboticists to prototype hardware designs for robots in silicon while maintaining the common development practices in robotics. Their results were demonstrated with ROS 2, a popular robotics development kit but it can also be used with other robotics frameworks.
Their paper has been accepted at the International Conference on Intelligent Robots and Systems (IROS 2022), one of the most prestigious venues in robotics, and will be presented next October in Kyoto (Japan).
Additional resources
- paper preprint: RobotCore: An Open Architecture for Hardware Acceleration in ROS 2
- Press Kit with high-resolution photos and diagrams
- Acceleration Robotics
- Harvard Edge Computing Lab
About Acceleration Robotics
Acceleration Robotics is a firm focused on designing customized brains for robots to hasten their response time. Founded by top robotic experts to deliver semiconductor building blocks for robots, the company leverages GPUs and FPGAs to create custom hardware that speeds up a robot's operation.
About Edge Computing Lab
The Edge Computing Lab resides in the John A. Paulson School of Engineering and Applied Sciences at Harvard University. Its team of computer system architects specializes in edge computing platforms, with expertise in understanding the interactions across the circuits, architecture, and software layers.